Posts Tagged HRI
The ‘Bot in the box’ Technique for remote HRI studies
Posted by Tal Oron-Gilad in HRI, human factors engineering, robotics on February 22, 2022
Here we describe a new method to conduct studies in HRI that we developed during the COVID-19 lockdowns.
Understanding and Resolving Failures in Human-Robot Interaction
Posted by Tal Oron-Gilad in HRI, Human-Robot Interaction, News, robotics on June 2, 2018
Shanee Honig and I have just finished a literature review on resolving failures in HRI. The Full publication can be found in Frontiers .
We mapped a taxonomy of failures, separating technical failures from interaction failures [see 1].

A human-robot failure taxonomy
After reviewing the cognitive considerations that influence people’s ability to detect and solve robot failures, as well as the literature in failure handling in human-robot interactions, we developed an information processing model called the Robot Failure Human Information Processing (RF-HIP) Model, modeled after Wogalter’s C-HIP (an elaboration of Shannon & Weavers 1948 model of communication), to describe the way people perceive, process, and act on failures in human robot interactions.
- RF-HIP can be used as a tool to systematize the assessment process involved in determining why a particular approach to handling failure is successful or unsuccessful in order to facilitate better design.

The RF-HIP (robotic failure – human information processing) Model
abstract
While substantial effort has been invested in making robots more reliable, experience demonstrates that robots operating in unstructured environments are often challenged by frequent failures. Despite this, robots have not yet reached a level of design that allows effective management of faulty or unexpected behavior by untrained users. To understand why this may be the case, an in-depth literature review was done to explore when people perceive and resolve robot failures, how robots communicate failure, how failures influence people’s perceptions and feelings towards robots, and how these effects can be mitigated. 52 studies were identified relating to communicating failures and their causes, the influence of failures on human-robot interaction, and mitigating failures. Since little research has been done on these topics within the Human-Robot Interaction (HRI) community, insights from the fields of human computer interaction (HCI), human factors engineering, cognitive engineering and experimental psychology are presented and discussed. Based on the literature, we developed a model of information processing for robotic failures (Robot Failure Human Information Processing (RF-HIP)), that guides the discussion of our findings. The model describes the way people perceive, process, and act on failures in human robot interaction. The model includes three main parts: (1) communicating failures, (2) perception and comprehension of failures, and (3) solving failures. Each part contains several stages, all influenced by contextual considerations and mitigation strategies. Several gaps in the literature have become evident as a result of this evaluation. More focus has been given to technical failures than interaction failures. Few studies focused on human errors, on communicating failures, or the cognitive, psychological, and social determinants that impact the design of mitigation strategies. By providing the stages of human information processing, RF-HIP can be used as a tool to promote the development of user-centered failure-handling strategies for human-robot interactions.
PhD Positions SOCRATES @ BGU
Posted by Tal Oron-Gilad in HRI, News on September 19, 2016
SOCRATES see project recruitment-poster
With Prof. Yael Edan, we are looking for a Ph.D. student in Human-Robot Interaction Design. The research topic will be: Interaction design for varying levels of automation
Ben-Gurion University is seeking outstanding candidates for a PhD student position in Interaction design for varying levels of automation, at the Department of Industrial Engineering and Management. BGU is an internationally recognized research university that attracts outstanding faculty and researchers from around the world with over 19,000 students. The Industrial Engineering and Management Dept. at BGU includes multidisciplinary faculty with expertise in operations research, applied statistics, intelligent systems, human factors engineering, and information systems. Advanced innovative multidisciplinary robotics research at BGU is conducted under the auspices of the ABC Robotics Initiative.
SOCRATES
The recruitment is done as part of SOCRATES (SOcial Cognitive Robotic Agents in The European Society), a new Marie Skłodowska-Curie European Training Network (ETN) comprising of 7 universities/research institutes: Umeå University and Örebro University in Sweden, Universität Hamburg and Fraunhofer IPA, Stuttgart in Germany, CSIC Barcelona in Spain, University West of England, and Ben-Gurion University of the Negev in Israel. Additional non-academic partners are: Pal Robotics, Adele Robots, Alfred Nobel Science Park, Urquhart-Dykes & Lord LLP, Center for Digital Innovation, UMINOVA, Asea Brown Boveri, S.A, and Fundació ACE.
In total 15 Early Stage Researchers (ESRs) will be recruited as PhD students for research on various aspects of social robotics aiming at eldercare. The wide range of projects covers a spectrum from technical design of hardware and interaction methodology, to personalization, user studies, and robot ethics. The researchers will receive training in both academic and entrepreneurial spirit and expertise, well suited for a career in both academy and industry. The training includes a research project, courses, seminars, and workshops. An overview of all available positions can be found at www.socrates-project.eu.
This Research project: Within the realm of assistive robotics for the elderly, the Ph.D. student will aim to develop advanced human-robot interfaces and means of interaction for dynamically changing situations. The focus is on means to improve coordination between users and their robots, and allow the user and the robot to operate as a team with varying levels of control and autonomy, dependent on the context and tasks, in particular in robot learning scenarios. The user involvement and hence the Interaction Quality will vary as a result of the learning progress. This is particularly important to consider when the robot interacts with older adults who have difficulties in identifying changes in the robot’s behavior.
The student will visit Örebro University and the Ängen test facility in Sweden to record and analyze user acceptance for different interface and interaction designs and modalities. Specific experiments will be designed so as to simulate the different types of feedback and changing levels of interaction. These will be implemented on robots in different use-case scenarios with older adults and for different modalities and means of interaction. The research will also include two secondments; one to Bristol Robotics Labs, UK to investigate the relation between adaptive safety control and the human-robot interface design, and one industrial secondment to ADELE Robots, to investigate practical case studies.
About the position: The successful applicant will receive a competitive salary for a period of three years of full time research, provided that the expected study and research results are achieved. No teaching is expected. The salary will be based on the standard Marie Skłodowska-Curie Early-Stage Researcher living and mobility allowances. Expected starting date is 1st of April 2017.
Admission requirements:The applicants must have completed their MSc or MA thesis in Engineering, Computer Sciences, Psychology, or Cognitive science. The applicant must be skilled in both oral and written communication in English, be able to work independently as well as in collaboration with others. We are looking for candidates with strong technical and programming skills. Experience in robotics, human factors, machine learning and statistics are merits. Candidates should have interest in studying human-robot interaction (although should not necessarily have background in such topics) and be passionate about learning and developing knowledge in a novel and exciting area.
Once approved by BGU’s SOCRATES graduate committee the student must be accepted to BGU’s Kreitman graduate school (http://in.bgu.ac.il/en/kreitman_school/Pages/admission.aspx) and obtain a visa and working permit according to the Israeli Ministry of Interior requirements. The candidate must submit a research proposal and go through a Qualification Exam within one year of studies on his/her research proposal.
To promote mobility, the following rule applies: at the time of recruitment, the applicants must not have resided or carried out their main activity in Israel for more than 12 months during the last 3 years. Compulsory national service, work in international organizations, and short stays such as holidays are not taken into account. The applicants must not, at the time of recruitment, have spent more than 4 years doing research, and must not have been awarded a doctoral degree.
Application – a complete application should contain the following documents:
- A cover letter including a description of your research interests, your reasons to apply for the position, and your contact information.
- A curriculum vitae.
- Copies of degree certificates, including documentation of completed academic courses and obtained grades.
- Copy of completed MSc or MA thesis and other original research publications.
- Contact information for three persons willing to act as references (including your thesis advisor).
- Documentation of programming skills and software development experience.
Applications must be submitted electronically to the following email by November 30, 2016.
Applications will be accepted until the position is filled.
For additional information about the position, please contact: Prof. Yael Edan – yael@bgu.ac.il Prof. Tal Oron-Gilad – orontal@bgu.ac.il
For general information about the SOCRATES project, please contact: Prof. Thomas Hellström – thomash@cs.umu.se
IEEE RO-MAN 2016 presentations
Posted by Tal Oron-Gilad in HRI, News, robotics on May 28, 2016
Two of our works have been accepted as full papers for presentation and publication in the IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN 2016).
“Postures of a Robot Arm – window to robot intentions?” authored by my doctoral student Sridatta Chaterjee and co-authored by my colleagues Drs. Oren Shriki and Idit Shalev.
Abstract— Body language of robot arms, have rarely been explored as a medium of conveying robot intentions. An exploratory study was done focusing on two questions: one, if robot arm postures can convey robot intentions, and two, if participants coming in contact with this robot arm for the first time can associate any meaning to the postures without watching the robot in action, or working with it. Thirty five participants of a wide age range (25-70) took part in this exploratory study. Results show that participants could interpret some postures. Four distinct types of postures have been selected to four separate categories by the majority of participants irrespective of their age. In addition, postures selected in categories like, ‘Robot giving object in a friendly manner’; ‘Robot is saying Hi!’, ‘Robot has been told not to disturb’ show similarity to body language exhibited by humans and animals while communicating such messages.

Posture 8, what is the robot doing?
“The Influence of Following Angle on Performance Metrics of a Human-Following Robot” co-authored by our graduate students Shanee Honig and Dror Katz, and my colleague Prof. Yael Edan.
Abstract— Robots that operate alongside people need to be able to move in socially acceptable ways. As a step toward this goal, we study how and under which circumstances the angle at which a robot follows a person may affect the human experience and robot tracking performance. In this paper, we aimed to assess three following angles (0◦ angle, 30◦ angle, and 60◦ angle) under two conditions: when the robot was carrying a valuable personal item or not. Objective and subjective indicators of the quality of following and participants’ perceptions and preferences were collected. Results indicated that the personal item manipulation increased awareness to the quality of the following and the following angles. Without the manipulation, participants were indifferent to the behavior of the robot. Our following algorithm was successful for tracking at a 0◦ and 30◦ angle, yet it must be improved for wider angles. Further research is required to obtain better understanding of following angle preferences for varying environment and task conditions.
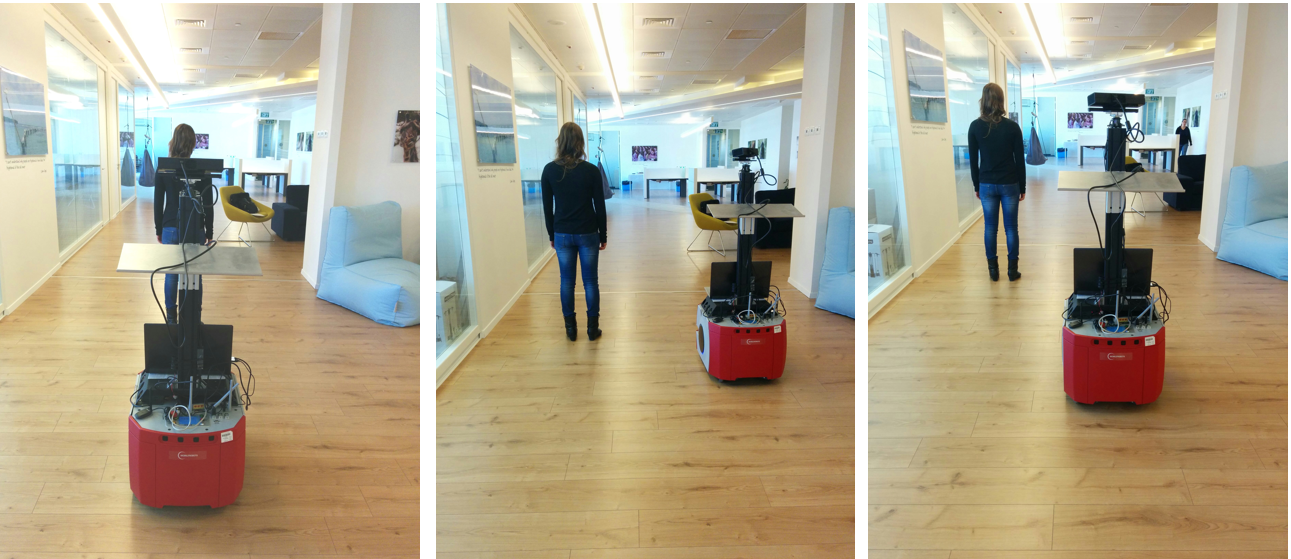
Following angles of a person-following robot: straight from behind or wider angles?
NY, Looking forward to two great presentations!
What do we think we are doing: principles of coupled self-regulation in human-robot interaction (…
Posted by Tal Oron-Gilad in HRI, robotics on June 25, 2015
The use of domestic service robots is becoming widespread. While in industrial settings robots are often used for specified tasks, the challenge in the case of robots put to domestic use is to affo…
via What do we think we are doing: principles of coupled self-regulation in human-robot interaction (….

